# 5.2. Create global Map 构造全局地图
这里介绍 module/map/map_base.py 内 CampaignBase 类构造的全局地图(Global Map)。
# 创建全局地图
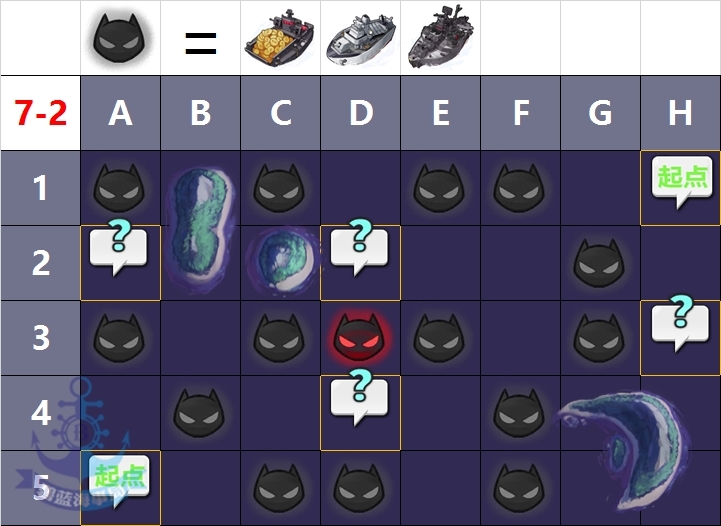
早期,地图信息都是手动编写的,以 7-2 的地图为例:
现在,交由 dev_tools/map_extractor.py 根据游戏解包数据自动生成就可以了,开发者只需要检查是否有错误,或进行优化。
MAP = CampaignMap('7-2')
MAP.shape = 'H5'
MAP.map_data = '''
ME ++ ME -- ME ME -- SP
MM ++ ++ MM -- -- ME --
ME -- ME MB ME -- ME MM
-- ME -- MM -- ME ++ ++
SP -- ME ME -- ME ++ ++
'''
MAP.weight_data = '''
40 30 30 30 30 30 30 30
20 20 20 10 20 20 20 20
10 10 10 10 10 10 10 10
20 20 20 10 20 20 20 20
30 30 30 30 30 30 30 30
'''
MAP.camera_data = ['D3', 'D2']
MAP.camera_data_spawn_point = ['D3', 'D2']
MAP.spawn_data = [
{'battle': 0, 'enemy': 3},
{'battle': 1, 'enemy': 2, 'mystery': 1},
{'battle': 2, 'enemy': 2, 'mystery': 1},
{'battle': 3, 'enemy': 1, 'mystery': 2},
{'battle': 4, 'enemy': 1},
{'battle': 5, 'boss': 1},
]
A1, B1, C1, D1, E1, F1, G1, H1, \
A2, B2, C2, D2, E2, F2, G2, H2, \
A3, B3, C3, D3, E3, F3, G3, H3, \
A4, B4, C4, D4, E4, F4, G4, H4, \
A5, B5, C5, D5, E5, F5, G5, H5 = MAP.flatten()
# shape
地图网格大小,未设置时,根据 map_data 产生
# map_data
地图中所有网格的信息,以 7-2 为例
地图信息定义为
MAP.map_data = '''
ME ++ ME -- ME ME -- SP
MM ++ ++ MM -- -- ME --
ME -- ME MB ME -- ME MM
-- ME -- MM -- ME ++ ++
SP -- ME ME -- ME ++ ++
'''
这些符号的含义,在 module.map_detection.grid_info.py 中。
| print_name | property_name | description |
|---|---|---|
| ++ | is_land | fleet can't go to land |
| -- | is_sea | sea |
| __ | submarine spawn point | |
| SP | is_spawn_point | fleet may spawns here |
| ME | may_enemy | enemy may spawns here |
| MB | may_boss | boss may spawns here |
| MM | may_mystery | mystery may spawns here |
| MA | may_ammo | fleet can get ammo here |
| MS | may_siren | Siren/Elite enemy spawn |
# map_data_loop
周回模式下的地图信息,部分活动图在周回模式前后有变化,需要额外定义。
# camera_data
Alas 会将画面中心对准这些格子,来扫描海域。未定义时,根据 shape 生成。
MAP.camera_data = ['D4', 'E4', 'E2']
- 镜头信息需要覆盖到所有会刷怪的格子
- 镜头信息需要尽可能地少,位置尽可能接近,来加快扫描速度
在大部分地图中,有效的区域只有 (-3, -1, 3, 2),也就是镜头中心左右三排以内,往上一行到往下两行的区域。往上第二行,由于地图 buff 会遮挡敌人星级,一般视为无效。但如果刚好那个格子不会刷怪,可以视作有效,从而减少 camera_data
# camera_data_spawn_point
在进入地图后的第一次扫描,Alas 会扫描舰队刷新点,来找到己方舰队的位置。由于全图扫描在扫描到所有预期的敌人之后便会停止(早停,early stop),这可能会漏掉舰队刷新点。camera_data_spawn_point 可以强迫 Alas 在第一次扫描时经过这些点。
camera_data_spawn_point 通常是 camera_data 中,可以看到舰队刷新点的格子。
# spawn_data
定义每一战过后的敌人刷新信息。由于全图扫描具有早停(early stop)的特性,spawn_data 需要尽可能地准确来触发早停。否则 Alas 会经过 camera_data 中所有定义的点。
例如 7-2
MAP.spawn_data = [
{'battle': 0, 'enemy': 3},
{'battle': 1, 'enemy': 2, 'mystery': 1},
{'battle': 2, 'enemy': 2, 'mystery': 1},
{'battle': 3, 'enemy': 1, 'mystery': 2},
{'battle': 4, 'enemy': 1},
{'battle': 5, 'boss': 1},
]
# spawn_data_loop
周回模式下的敌人刷新信息,部分活动图在周回模式前后有变化,需要额外定义。
# weight_data
每个格子的权重,优先选择值权重小的点。默认情况下,Alas 将优先选择权重小的点,权重相同时,再选择距离短的点。
权重需要是 1-99 之间的整数。
MAP.weight_data = '''
40 30 30 30 30 30 30 30
20 20 20 10 20 20 20 20
10 10 10 10 10 10 10 10
20 20 20 10 20 20 20 20
30 30 30 30 30 30 30 30
'''
# wall_data
穹顶下的圣咏曲(event_20200521_cn)中定义 “光之壁”。“光之壁” 将阻挡舰队从一个格子去往另一个格子。
以 D2 为例,· 代表格子,用 - 和 | 定义 “光之壁”。这将在寻路中断开两个格子之间的连接。
MAP.wall_data = """
· · | · · · · · · · · · ,
+ ,
· · · · · · · · · · | · ,
+ + + + + ,
· · | · · | · | · · · · | · · ,
+---+---+ | | + ,
· · · | · · | · · · · | · | · ,
+---+ +---+ +---+ +-- ,
· · · · · · · · · · · ,
,
· · · · · · · · · · · ,
,
· · · · · · · · · · · ,
"""
# portal_data
蝶海梦花 (event_20200917_cn) 活动中定义 “传送门”。玩家舰队到达至 “传送门” 的一端后,将被移动至另一端,同时镜头重新对准当前舰队。
以 HT5 为例,定义两个传送门之间的连接,这将在寻路中额外连接两个格子。
MAP.portal_data = [('D3', 'F3'), ('G4', 'G6'), ('F7', 'D7'), ('C6', 'C4')]
# land_based_data
复刻峡湾间的星辰(event_20200921_en)活动中定义 “岸防炮”。“岸防炮” 会炮击它朝向的三格以内,玩家舰队经过时会被打断,前往岸防炮四周的格子可摧毁岸防炮。
以 SP3 为例,定义岸防炮的位置和朝向。
MAP.land_based_data = [['H7', 'up'], ['D5', 'left'], ['G3', 'down'], ['C2', 'right']]
# maze_data
复兴的赞美诗(event_20210421_cn)活动中定义 “迷宫”。“迷宫“ 会产生 ”障碍“ 阻挡玩家移动,玩家舰队每移动 3 次,迷宫改变一次。
以 D2 为例,定义一个循环里,迷宫产生的障碍。障碍将在寻路中,与陆地一样,被Alas视为不可到达的海域。
MAP.maze_data = [('A4', 'I6'), ('F9', 'D1', 'E5'), ('A7', 'C9', 'G1', 'I3')]
# fortress_data
碧海光粼(event_20210916_cn)活动中定义 “机关”,玩家需要击败所有机关中的敌人,才能解锁被锁定的格子,通往 BOSS 点。
以 D3 为例,定义机关位置和被锁定的格子,机关将被视作精英(siren),在机关未解锁之前,被锁定的格子视作不可到达。
MAP.fortress_data = [('B5', 'E2', 'H5', 'E8'), 'G3']
# 展平地图
这是为后续编写索敌逻辑做的准备
A1, B1, C1, D1, E1, F1, G1, H1, \
A2, B2, C2, D2, E2, F2, G2, H2, \
A3, B3, C3, D3, E3, F3, G3, H3, \
A4, B4, C4, D4, E4, F4, G4, H4, \
A5, B5, C5, D5, E5, F5, G5, H5, \
= MAP.flatten()
可以使用以下代码生成
shape = 'H5'
def location2node(location):
return chr(location[0] + 64 + 1) + str(location[1] + 1)
def node2location(node):
return ord(node[0]) % 32 - 1, int(node[1]) - 1
shape = node2location(shape.upper())
for y in range(shape[1]+1):
text = ', '.join([location2node((x, y)) for x in range(shape[0]+1)]) + ', \\'
print(text)
print(' = MAP.flatten()')